








A standardized application software
developed specifically for
3D binpicking software
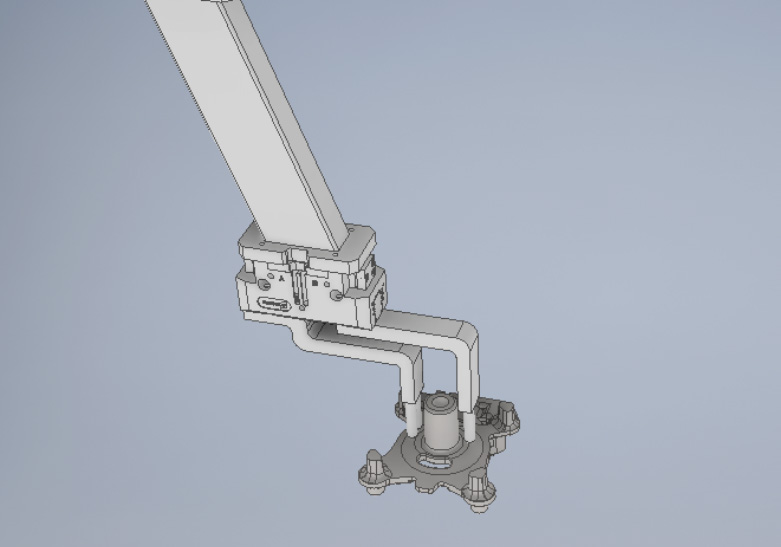
We have integrated core algorithm modules such as image processing, 3D recognition, motion trajectory planning, and collision detection to develop a powerful and user-friendly standardized software. This software helps customers easily complete complex disordered grabbing tasks.




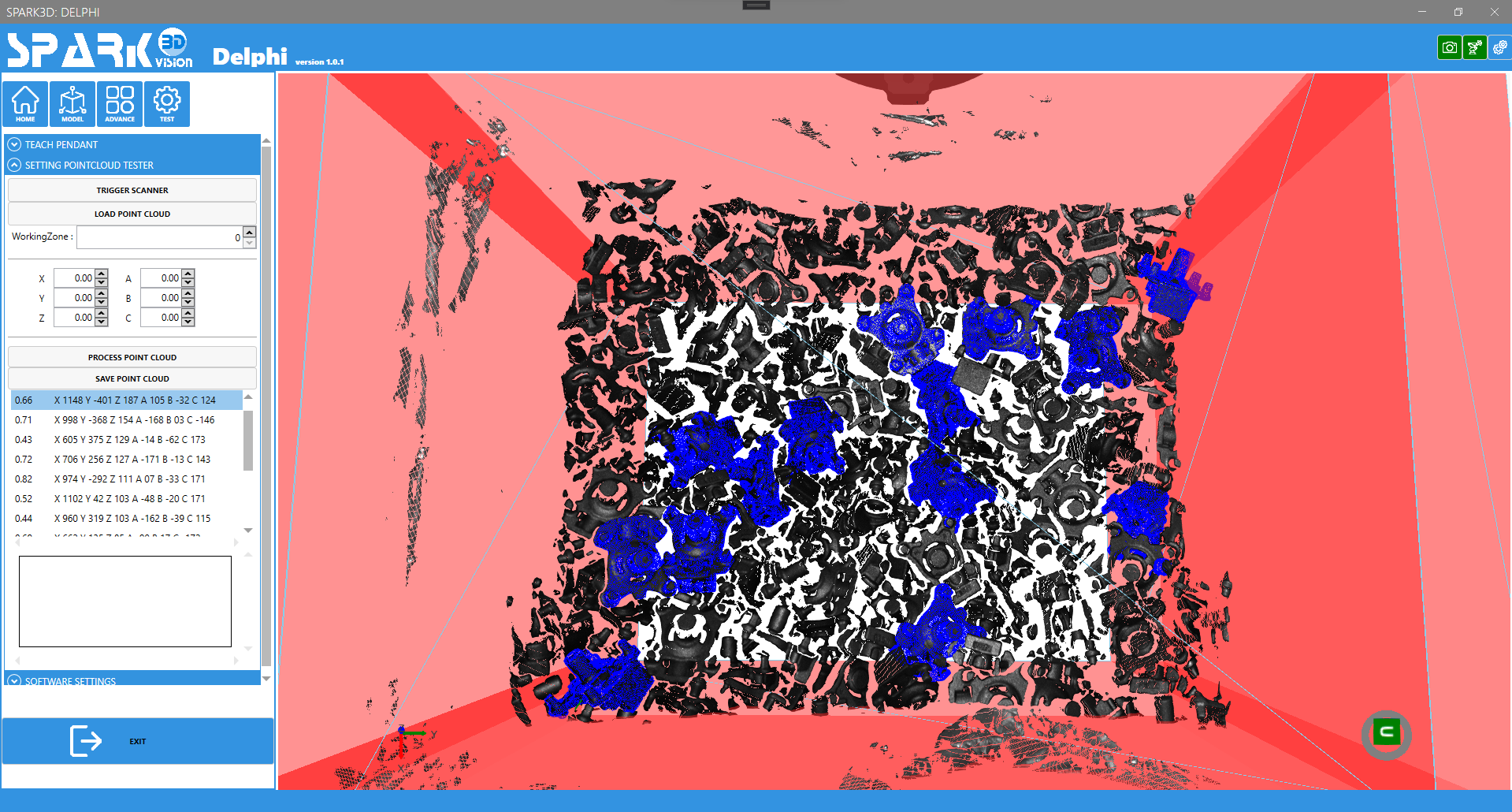
 Which part should be picked first from the material box?
Which part should be picked first from the material box?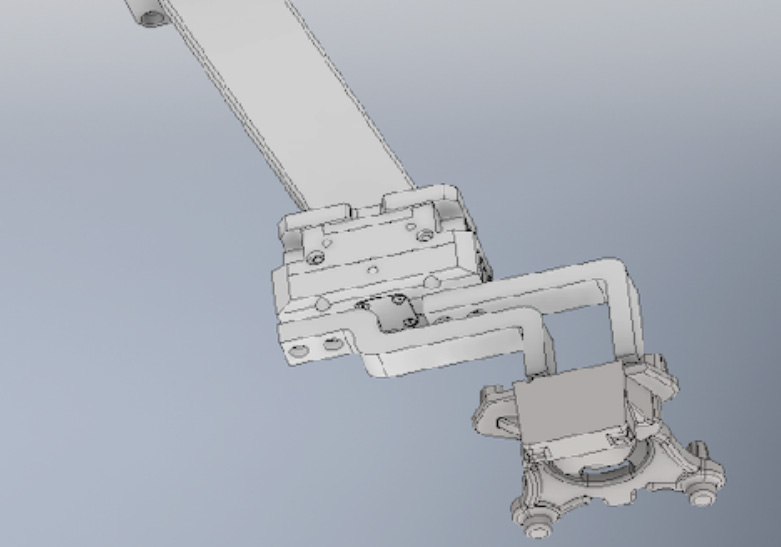
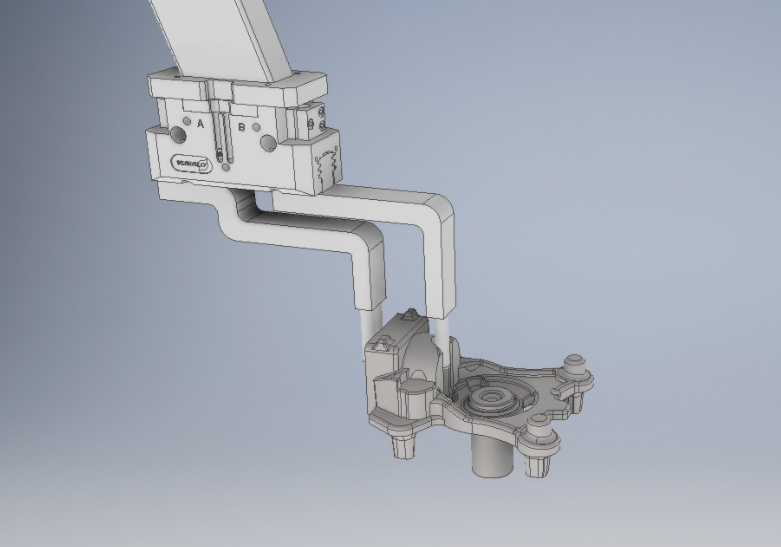
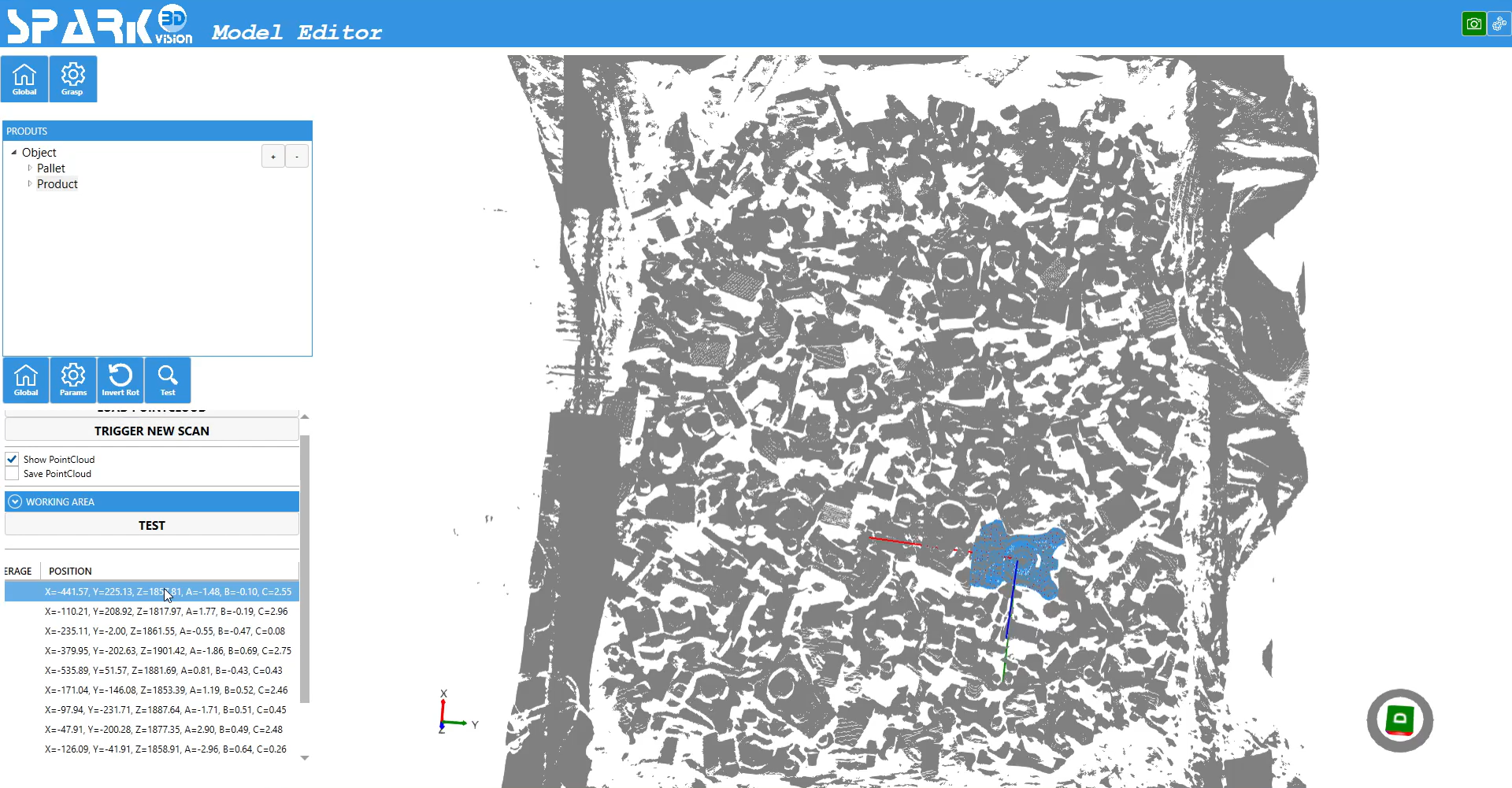
 How to efficiently obtain the best way to grasp parts?
How to efficiently obtain the best way to grasp parts?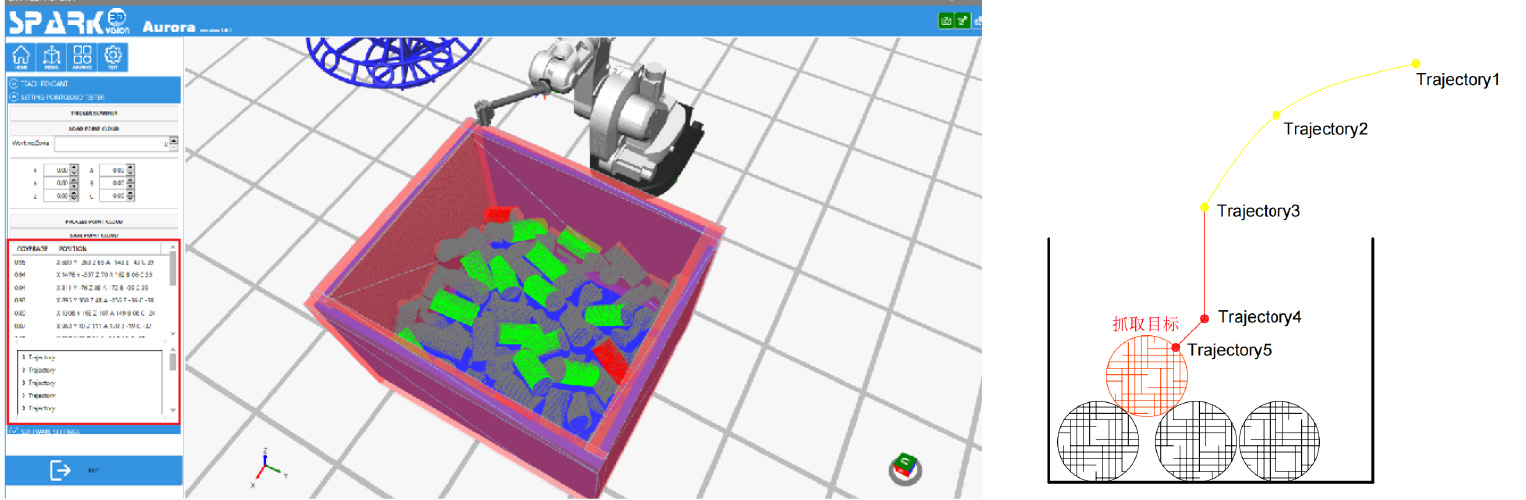
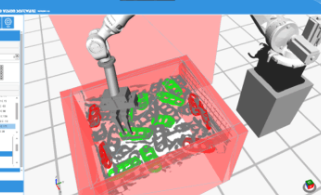
 How to avoid collisions while grasping and extracting parts?
How to avoid collisions while grasping and extracting parts?




 WhatsApp
WhatsApp Follow Us
Follow Us